[5] 3mins papers
paper
3mins
Impedance Matching/ / / /
Impedance Matching: Enabling an RL-Based Running Jump in a Quadruped Robot
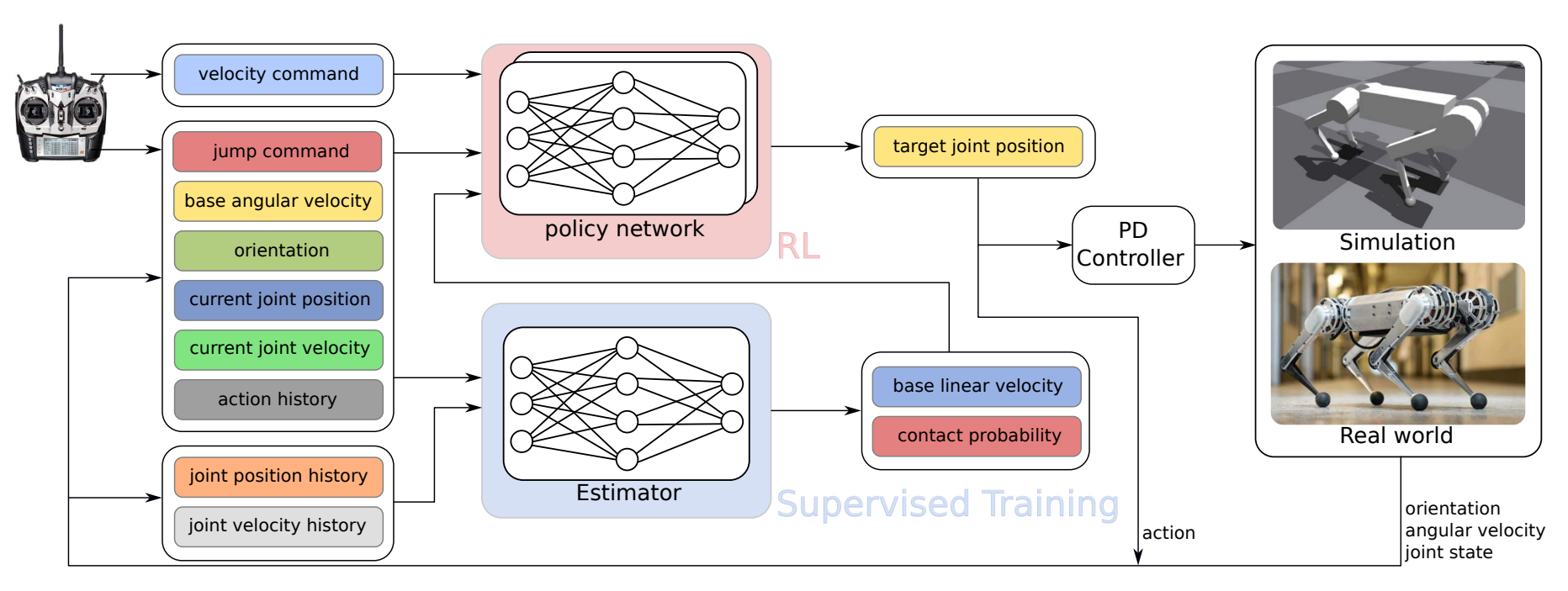
- 강화학습(Reinforcement Learning, RL)을 활용하여 사족보행 로봇의 점프 동작을 구현하는 동시에, 시뮬레이션-현실 간의 성능 차이(sim-to-real gap)를 줄이는 새로운 기법을 제안함. 이를 위해서 주파수 영역에서의 임피던스 매칭 기법을 활용하였음
- 기존의 연구는 Domain gap, 무작위의 Domain randomization, 하나의 정책(점프 등)만을 학습, model-based의 reference motion을 참조 등이 필요했으나 본 연구에서는 임피던스 매칭 기법을 통해 Domain gap을 줄이고 reference없이 다양한 모션들을 수행할 수 있는 학습 방법을 제안함
- 지금까지의 연구에서는 점프 모션의 경우, model-based controller나 reference를 활용학습하는 것이 일반적이었으나, 본 논문은 순수 강화학습만으로 55cm의 거리를 점프하는 모습을 보임. 매우 흥미로워서 좀 더 깊이 파보고자 함.
- Paper Link