[1] 3mins papers
paper
3mins
DreamFLEX/RL-augmented MPC/CAIMAN/Safe RL/MPC Testbed
DreamFLEX
Learning Fault-Aware Quadrupedal Locomotion Controller for Anomaly Situation in Rough Terrains
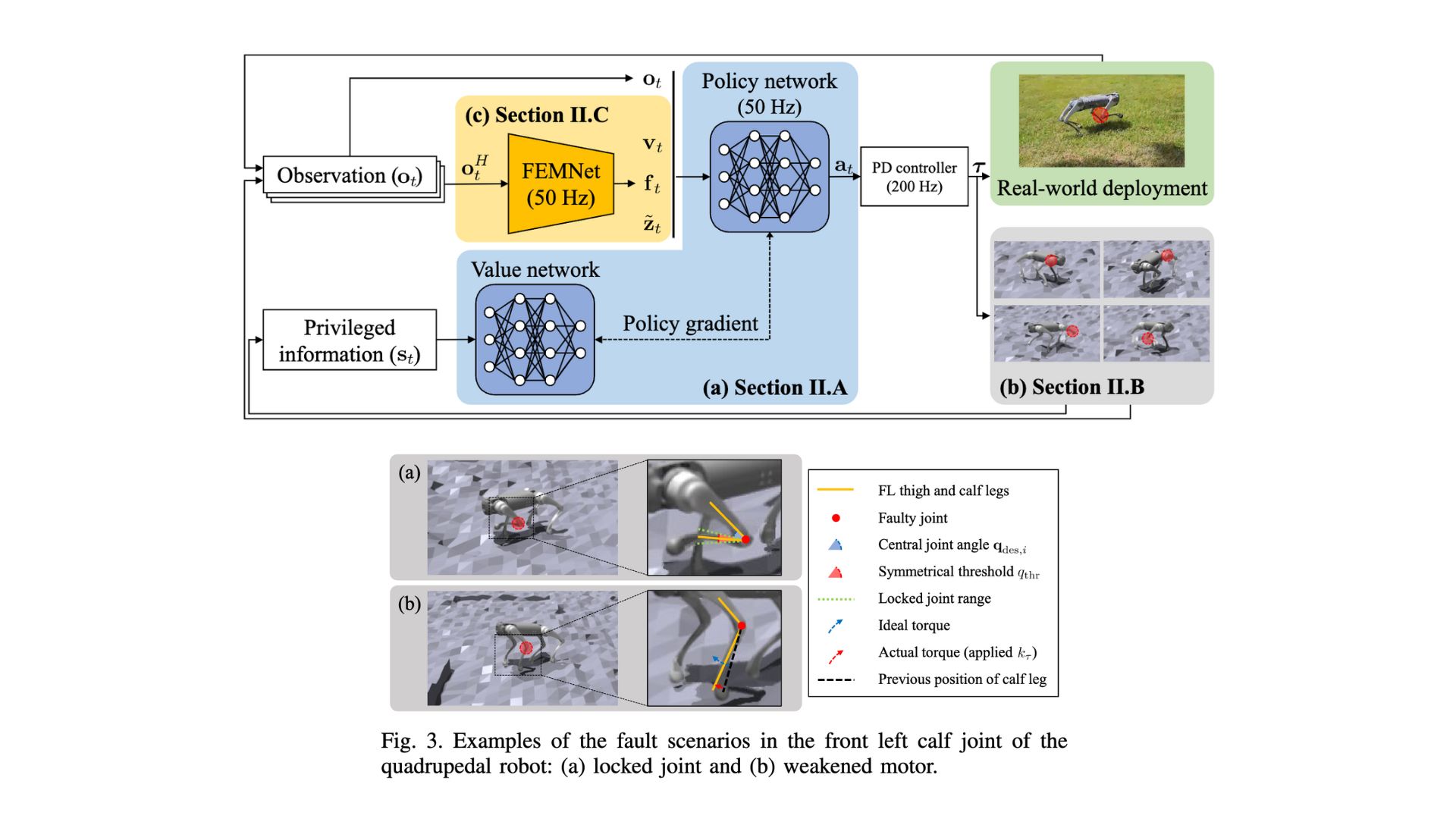
- 로봇이 실제 오래 구동했을 시에 마주칠 수 있는 하드웨어 결함에 대응하는 방법론, joint의 결함이 생기면 이를 감지하여 결함이 있는 상황에 맞춰서 보행 패턴을 재구성
- DreamWaQ의 컨셉을 유지하며 CENet을 FEMNet으로 바꾸어 조인트 결함을 감지하는 것과 연관있는 term \(f_t\) 추가
- Joint Fault의 상황은
locked joint와weakened motor` 2가지 경우에 대해 상황을 정의하여 결함이 있는 발을 제외하고서라도 보행하는 것이 목적 - Paper Link
RL-augmented MPC
Learning Agile Locomotion and Adaptive Behaviors via RL-augmented MPC
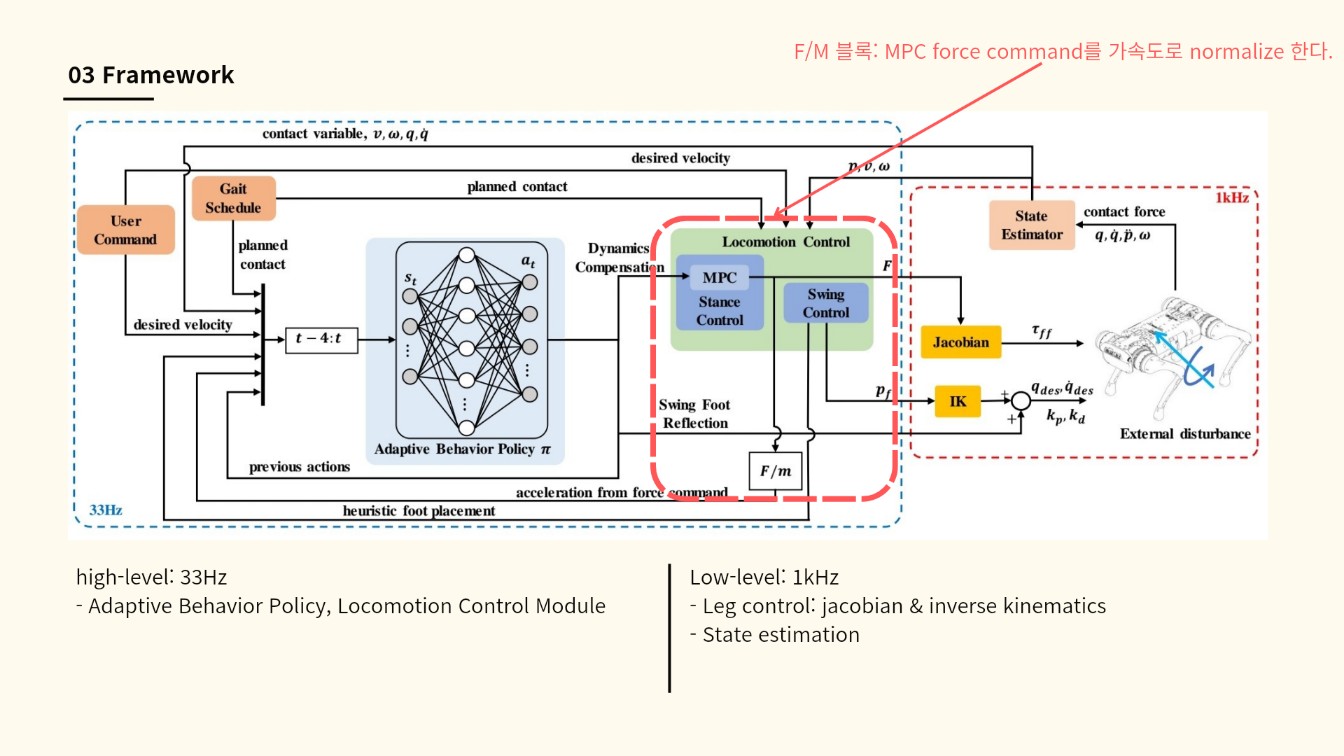
- RL을 보완하는 MPC 프레임워크 개발 고속 이동, 모델 불확실성 적응, 장애물 회피를 포함하는 적응형 블라인드(blind) 보행을 실현
- 스탠스 발 힘 제어(stance foot force control)와 스윙 발 반사(swing foot reflection)를 결합 기존 MPC가 직면한 스윙 발 궤적의 불확실성 문제를 해결 모델 불확실성(model uncertainty)에 적응하면서 로봇의 균형 유지 능력을 개선
- 로봇-독립적(robot-agnostic) RL 모듈 도입 다양한 로봇 플랫폼(Unitree A1, Go1, AlienGo)에서 zero-shot transfer 가능 RL 정책이 특정 로봇에 최적화되지 않고 다양한 환경에서도 일반화 가능
- stance phase와 swing phase를 분리하는 것은 당연한 전제로 생각했었는데, 이를 혼합하려는 시도는 신선하게 느껴짐
- Paper Link
CAIMAN
Causal Action Influence Detection for Sample Efficient Loco-manipulation
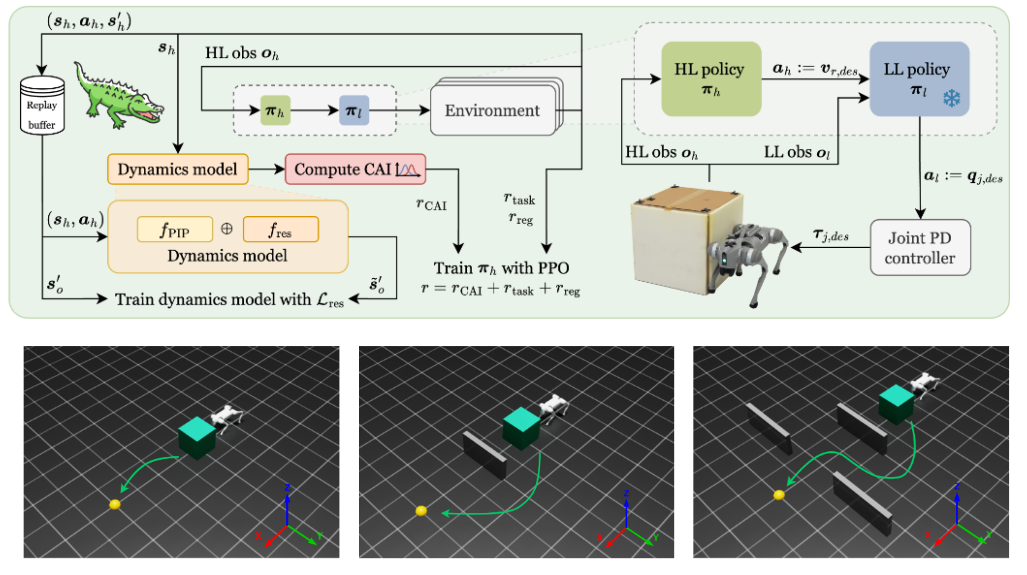
- 4족보행 로봇이 크고 무거운 물체를 조작하며 이동할 수 있도록 비-파지(non-prehensile) 방식으로 크고 무거운 물체를 조작하며 이동(loco-manipulation)하는 Task를 학습
- causal action influence(인과적 행동 영향, CAI)을 활용하여 로봇이 환경을 제어하는 상태를 탐지하고, 이를 내재적 동기(intrinsically motivated objective)로 삼아 hierarchical control strategy을 통해 학습
- 물체를 미는 물리적 결과에 대한 동역학 모델을 학습하여 CAI 값을 끌어낸다는 점이 특이해서 흥미로웠으며, 최근에 Loco-Manipulation이라고 하면 보통 매니퓰레이터를 간단한거라도 다는데 여기에서는 그냥 밀기였음
- Paper Link
Safe RL/MPC Testbed
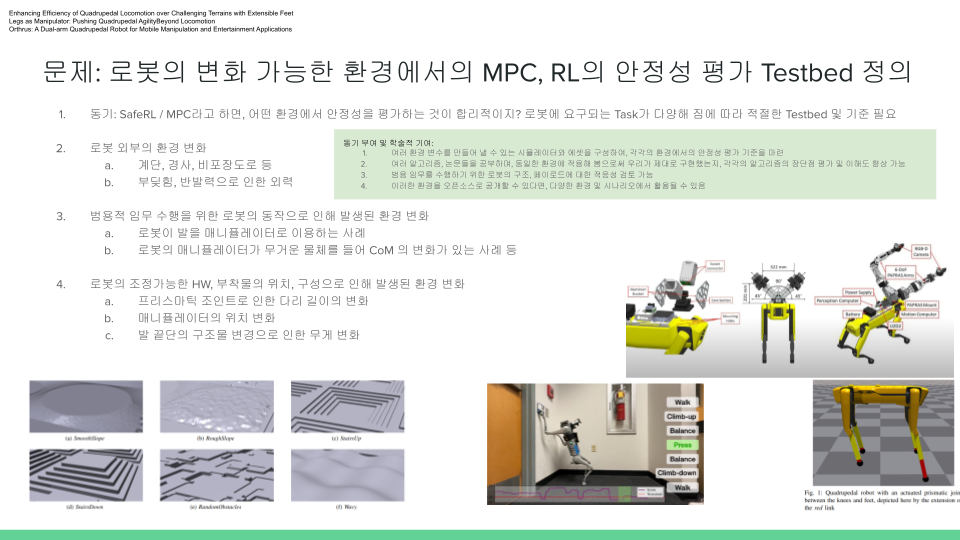
로봇의 변화 가능한 환경에서의 MPC, RL의 안정성 평가 Testbad 정의
- SafeRL/MPC라고 하면, 어떤 환경에서 안정성을 평가하는 것이 합리적인가
- 로봇에 요구되는 Task가 다양해짐에 따라 평가할 수 있는 적절한 Testbed 및 기준 필요
- 환경변화로 “로봇 외부의 환경 변화”, “범용적 임무 수행을 위한 로봇의 동작으로 인해 발생된 환경 변화”, “로봇의 조정 가능한 HW, 부착물의 위치, 구성으로 인해 발생된 환경 변화”를 생각해볼 수 있음